



Partie n° 1- cinétique :
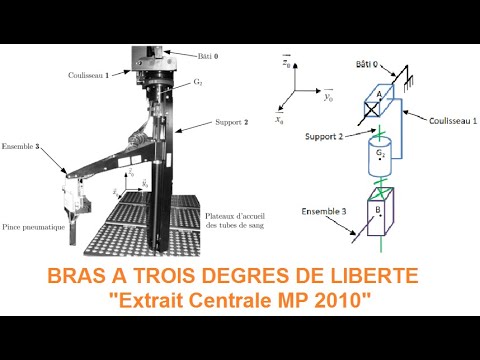
Le bras implanté sur le système ADVIA WorkCell R, dont une photographie est fournie figure 1, est motorisé selon trois « axes » asservis (appelés « Axe N° 1 », « Axe N° 2 » et « Axe N° 3 » dans la suite) assurant les mouvements de type translation / rotation / translation.
Le bras est constitué de quatre solides indéformables : Bâti 0, Coulisseau 1, Support 2 et Ensemble bras + pince + tube 3.
Questions:
Q.1. Déterminer le torseur cinétique du coulisseau 1 par rapport au repère R0 réduit au point G1.
Q.2. Déterminer le torseur cinétique du support 2 par rapport au repère R0 réduit au point G2.
. Q.3. Déterminer le torseur cinétique de l’ensemble 3 par rapport au repère R0 réduit au point G3.
Q.4. Déterminer en projection sur x0 ;la résultante dynamique du système E = 1 + 2 + 3 par rapport au repère R0.
Q.5. Déterminer en projection sur z0 ;le moment dynamique au point G2 du système S = 2 + 3 par rapport au repère R0.
Q.6. Déterminer l’énergie cinétique du système E = 1 + 2 + 3 par rapport au repère R0.
Le bras implanté sur le système ADVIA WorkCell R, dont une photographie est fournie figure 1, est motorisé selon trois « axes » asservis (appelés « Axe N° 1 », « Axe N° 2 » et « Axe N° 3 » dans la suite) assurant les mouvements de type translation / rotation / translation.
Le bras est constitué de quatre solides indéformables : Bâti 0, Coulisseau 1, Support 2 et Ensemble bras + pince + tube 3.
Questions:
Q.1. Déterminer le torseur cinétique du coulisseau 1 par rapport au repère R0 réduit au point G1.
Q.2. Déterminer le torseur cinétique du support 2 par rapport au repère R0 réduit au point G2.
. Q.3. Déterminer le torseur cinétique de l’ensemble 3 par rapport au repère R0 réduit au point G3.
Q.4. Déterminer en projection sur x0 ;la résultante dynamique du système E = 1 + 2 + 3 par rapport au repère R0.
Q.5. Déterminer en projection sur z0 ;le moment dynamique au point G2 du système S = 2 + 3 par rapport au repère R0.
Q.6. Déterminer l’énergie cinétique du système E = 1 + 2 + 3 par rapport au repère R0.
- Catégories
- Photographies
Ajouter un commentaire
Up Next
Autoplay
-
01:13

Alpes-Maritimes: trois personnes sont portées disparues et trois autres sont supposées disparues, s
-
00:17
La meilleure cadence JAZZ avec ces trois degrés (+1 spécial)
-
33:43
501. Vibrations (Série 01- Exercice 01-Part 1: Nombre de degrés de liberté d'un système mécanique)
-
00:33
Trois événements - Trois tenues
-
01:39
Mon soleil bleu, peint en toute liberté#Art #Peinture #SoleilBleu #Liberté #Création #Inspiration
-
05:01

Bryan.G - Les Couleurs De L'amour
-
06:07

Cours De Guitare - Gipsy Kings : Bamboleo (2/8) Rythmique
-
04:45

Démonstration De Fleurs Réalisées à La Peinture à L'huile Et Au Couteau, Par Catherine VICTOIRE
-
01:14

Générique TARATATA (Musique Composée Par Jean-Jacques Goldman)
-
04:12

Run Away With Me by Section C
Commentaires